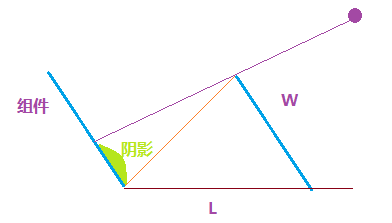
平单轴跟踪器的轴向一般是采用南北轴,其运行基本原理是确保组件在东西方向上跟太阳光线成直角,所以平单轴跟踪器跟踪的是太阳的方位角,而不是高度角。由于跟踪的范围一般是在-60°-60°,如果组件实时跟着太阳追踪,在早上或傍晚太阳高度角较小的时候,需要的跟踪角度一般会超过跟踪范围,而停留在±60°位置,此时前面一排组件会对后面一排产生遮挡。
对于平单轴跟踪系统,如果采用逆跟踪技术,可在减少阵列间距的同时,又能使光伏阵列间没有遮挡,那么就可以很好地解决跟踪系统面临的光伏发电量和占地面积的抉择问题。当确定使用逆跟踪技术后,为了提高发电量,还需要确定跟踪支架的东西间距,因为东西距离大,早晚逆跟踪算法启动的机会相对来说就会少一些,那么可保证组件平面上所接收的辐射量相对较大。当然,实际间距的选择还需要看可利用的土地面积。
逆跟踪算法:早上和傍晚的时候,支架能够反向旋转,使前排组件阴影刚好没遮到后排,实现入射角最大、发电量最大的目标。
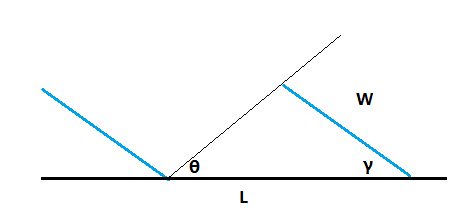
根据图1所示为南北轴向平单轴,某时刻的太阳位置,高度角为α,方位角为β,根据三角函数关系可得到:
正常跟踪时,跟踪器上的组件跟随着太阳运行轨迹变化而运动,其运行基本原理是确保组件在东西方向上跟太阳光线成直角,因此,正常情况下,跟踪角γ 和夹角θ 恒有:
以L 和 W为边,当θ+γ=90°时,为正常跟踪与逆追踪的临界角。那么γ临界角=acos(W/L),如果γ> acos(W/L),开始逆跟踪。根据三角函数,可计算得到逆向跟踪角度:
γ逆向跟踪角:asin(K*sinθ)-θ,其中K=L/W
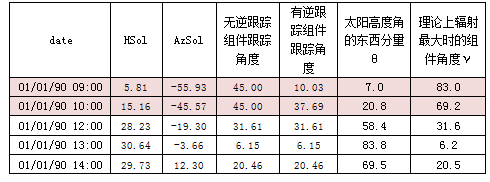
假设某项目平单轴跟踪支架组件纵向双排安装,2*10块组件。宽度3.32米,长度10.1米,跟踪范围-45°-45°。
使用PVsyst模拟得到输出结果,以1月1日为例,早上的九点和十点时刻,太阳的高度角分别为5.81°和15.16°,根据上述公式可计算得到太阳高度角的东西分量θ分别为7都和20.8°,理论上为了保证辐射的最大化,跟踪角度应为83°和69.2°,但是此时均超过了跟踪范围 45°,因此如果没有采用逆跟踪技术,此时的追踪角度为45度。如果采用逆跟踪,根据上述公式可计算得到分别为10°和37°。
在使用PVsyst软件计算逆跟踪对发电量的影响,需要考虑以下两点:
1、无论是否采用逆跟踪技术,光伏方阵接受的直接辐射并没有变,散射和反射可能有变化,一般情况下,逆跟踪的反而变小,也就是说,如果在PVsyst软件中采用“线性遮挡”模式,那么逆跟踪方式的发电量反而会略小。
2、如果在PVsyst软件中采用第三种阴影计算模式(根据Layout组串连接模式),那么逆跟踪应有明显的优势。

原文始发于微信公众号(坎德拉学院):平单轴跟踪器逆向跟踪阴影躲避技术解读